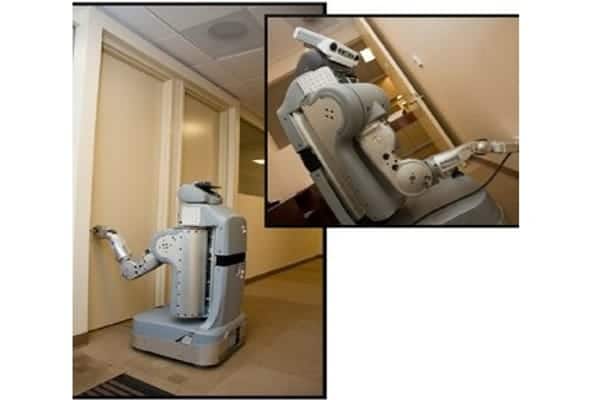
Robots can do many things, but opening doors is their kryptonite because it is a difficult task. Engineers at UC’s Intelligent Robotics and Autonomous Systems Laboratory used three-dimensional digital simulations to solve this complex problem. They are now developing an autonomous robot that can not only open its own doors but also locate the nearest electric wall outlet to recharge itself without the need for human intervention.
This simple step toward autonomy represents a significant advancement for helper robots that vacuum and disinfect office buildings, airports, and hospitals. Assistive robots are part of a $27 billion robotics industry that also includes manufacturing and automation.
In 3D digital simulations, engineering students created an autonomous robot that can find and open doors. They are currently developing the hardware for an autonomous robot that can not only open its own doors but also locate the nearest electric wall outlet to recharge itself without the assistance of a human.
The idea that robots will take over the world has a flaw in that the world is full of doors. And, according to Ou Ma, an aerospace engineering professor at the University of Cincinnati, doors are kryptonite for robots. “Robots can do a lot of things, but getting one to open a door and walk through it by itself is a huge challenge,” Ma said.
Robots can do a lot of things, but getting one to open a door by itself and walk through the doorway is a huge challenge. However, this is a time-consuming custom solution that only works for the specific room that is scanned.
Ou Ma, aerospace engineering professor
Students from the University of California’s Intelligent Robotics and Autonomous Systems Laboratory used three-dimensional digital simulations to solve this complex problem. They are now developing an autonomous robot that can not only open its own doors but also locate the nearest electric wall outlet to recharge itself without the need for human intervention.
This simple step toward autonomy represents a significant advancement for helper robots that vacuum and disinfect office buildings, airports, and hospitals. Assistive robots are part of a $27 billion robotics industry that also includes manufacturing and automation. The research was published in the IEEE Access journal.
The study’s lead author, UC College of Engineering and Applied Science doctoral student Yufeng Sun said some researchers have addressed the issue by scanning an entire room to create a 3D digital model so the robot can locate a door. However, this is a time-consuming custom solution that only works for the specific room that is scanned.
Sun said developing an autonomous robot to open a door for itself poses several challenges.
Doors come in a variety of colors and sizes, with handles that may be slightly higher or lower. To overcome resistance, robots must know how much force to apply to open doors. The majority of public doors are self-closing, which means that if the robot loses its grip, it must restart.
Due to the use of machine learning by UC students, the robot must “teach” itself how to open a door, essentially through trial and error. This can take some time at first, but the robot corrects itself as it goes. Sun claims that simulations help the robot prepare for the actual task.
“Robots can do a lot of things, but getting one to open a door by itself and walk through the doorway is a huge challenge,” said UC aerospace engineering professor Ou Ma. Sun estimated that it would take many months to convert their successful artificial intelligence from a simulation to a working robot. He and UC student Sam King, on the other hand, are ecstatic about the possibilities.
“The robot requires enough data or ‘experiences’ to help train it,” Sun explained. “This is a significant challenge for other robotic applications that use AI-based approaches to complete real-world tasks.” Sun is now working with UC master’s student Sam King to turn Sun’s successful simulation study into a real robot. “The challenge is transferring this learned control policy from simulation to reality, which is commonly referred to as a ‘Sim2Real’ problem,” Sun explained.
In general, the robot was less convincing when presented as an authority figure than when presented as a peer helper. This outcome could be attributed to a lack of legitimacy. People today lack both relationships and a sense of shared identity with robots, so social robots are uncommon. People may find it difficult to accept robots as legitimate authorities.
According to Sun, digital simulations are typically only 60% to 70% successful in initial real-world applications. He anticipates bridging the gap for a year or more in order to perfect his new autonomous robotics system.