Sweaty robots will be able to operate for extended periods of time without overheating. Metal robots are heat conductors and can quickly dissipate heat. Soft robots on the other hand can’t do it, so the team had to enchant a different approach. As reported in Science Robotics, the team believes this is an important step in creating high-powered robots without camps.
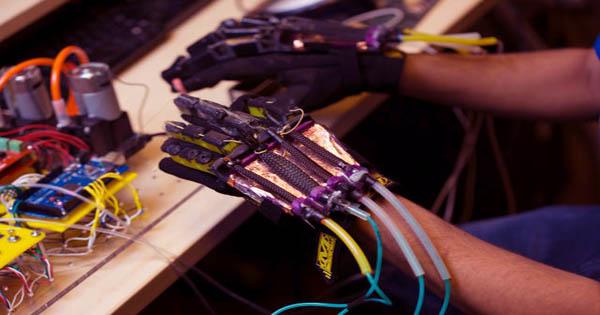
The materials were chosen because they can hold water and respond to temperature. Finger-like actuators can be 3D printed, hydraulically operated, and used to hold things. These are made of two hydrogel materials: a base layer of poly-N-isopropyl acrylamide covered in a porous layer of polyacrylamide.
The ability to suppress is one of the most important human traits, said co-author T.J. Wallin, a research scientist at Facebook Reality Labs, said in a statement.”Sweat takes advantage of the loss of evaporated water by cutting off heat very quickly and can cool down below ambient temperature. So as is often the case, provided a great guide for us as biology engineers.”
When the fingers reach a temperature of 30°C (86 F), the base layer reacts by compressing the water through the top micron-sized holes in the top layer. Evaporation is so efficient that the surface temperature of the actuator can drop from 21 degrees Celsius in just 30 seconds. It is three times more efficient than humans. When the air in a fan is blown into the mixture, it cools about six times faster. Evaporation also cools the object holding the actuator’s hand.
When sweating, the robot’s mobility is also disrupted and its water supply needs to be replenished. While the result is exciting, it is only the first step. Sweat can make the robots hand slippery, so the team is investigating the textures to make them stronger.
“The best part of this synthetic technique is that the heat regulator is built into the performance component,” Wallin said. We didn’t need to have sensors or other components to control the sweating rate. When the local temperature rose above the passage, the pores would simply open and close by themselves. “I think this is going to depend more on the composition of the future component of creating more biologically analogies and robots,” said co-lead author Rob Shepherd, an associate professor in the Department of Mechanical and Aerospace Engineering.”This brings to the fore a topic of multidisciplinary research in this field (about important topics) where there really aren’t all the answers for any group.”