The dynamic instability—the so-called ‘power hop’—that can cause uncontrollable bouncing and damage tractors when they plow dry ground was modeled by researchers at Tokyo University of Agriculture and Technology (TUAT). When the tractor pushes against the ground, the team discovered that self-excited oscillations can occur.
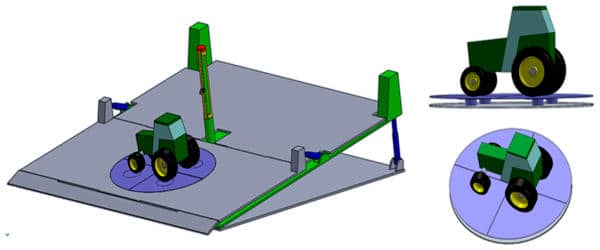
Plowing a field on a tractor may appear to be a peaceful occupation, but under certain conditions, sudden vibrations can grow unexpectedly and threaten to topple you. Small shakes in nonlinear systems with coupled components, such as a mechanical tractor, can grow exponentially until they become large oscillations. This is known as a ‘power hop’ on tractors. To better understand this potentially dangerous situation, TUAT researchers simulated equations corresponding to the tractor’s vertical, longitudinal, and pitching motion.
Researchers at Tokyo University of Agriculture and Technology (TUAT) modeled the dynamic instability—the so-called ‘power hop’—that can cause uncontrollable bouncing and damage tractors when they plow the dry ground.
“Our model incorporates dynamics such as bouncing, stick-slip friction, and free-play, which were missing from previous attempts to model this complex system,” says first author Masahisa Watanabe. On a millisecond scale, the equations were simulated using the fourth-order Runge-Kutta method.
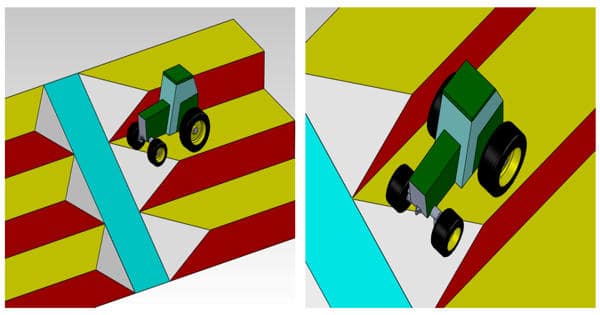
Draft load P was increased from 0 to 10 kN in the simulation. As the draft load increased, so did the tractive force on the front and rear tires. At T1, the front tractive forces exceeded the static friction limit fv,1 and there was stick-slip oscillation. The vertical loads and tractive forces vary as a result of this oscillation. This variation in the vertical load acting on the rear tires caused the rear tires to stick-slip at T2. When the oscillation became severe, the tractive forces decreased and there was free play at T3. Vertical loads acting on the front and rear tires became zero and the front and rear tires lost contact with the ground at points T4 and T5 respectively.
Using this method, the researchers were able to create bifurcation diagrams that depicted regions of stability and when power hop dynamics began. Power hop can occur as a result of drawbar pull, soil, and tire conditions, according to the model.
Tractors, the most common self-propelled agricultural machine, rough terrain forklifts, and all-terrain vehicles are becoming more popular around the world. Trailered machines, such as manure spreaders and slurry tankers, are also common, and trailers are required.
The majority of forestry machines, such as skidders, forwarders, harvesters, and processors, are self-propelled. The tractor and trailer are used to transport farm workers to and from farms, as well as farm produce from farms to local markets and stores. Because the individual farms are small and the farmers do not own tractors individually, the tractor and implement, both trailed and mounted, must also be moved from farm to farm, in some cases on unpaved hilly roads.
Power hops posed the greatest risk in situations involving high-draft loads on dry soil. That is, while bouncing, a dangerous feedback loop began, resulting in complete loss of traction with the ground. The model even explained why this instability is much more likely in four-wheel-drive tractors. “The results we obtained agree with farmers’ conventional wisdom about power hops, as well as previous experiments,” says senior author Kenshi Sakai. Nonlinear coupling between moving parts can occur in a variety of industrial settings, and knowing how to avoid chaotic dynamics or uncontrolled vibrations can lead to safer factories and farms.