Researchers used hydrodynamic and magnetic forces to power a rubbery, deformable pump that can provide soft robots with a circulatory system, effectively mimicking animal biology. The Tin Man lacked one. It was three sizes too small for the Grinch. Furthermore, the electronically powered pumps that serve as soft robots’ “hearts” are so bulky and rigid that they must be decoupled from the robot’s body – a separation that can leak energy and make the bots less efficient.
A collaboration between Cornell University researchers and the U.S. The Army Research Laboratory used hydrodynamic and magnetic forces to power a rubbery, deformable pump that can provide soft robots with a circulatory system, effectively mimicking animal biology.
The soft robot has no internal hard skeleton and no sensors. It crawls by directing air into and out of four elastomer leg compartments known as ‘pneu-nets’ and a body section via a network of valves and tubes. The pneumatically actuated robot can navigate obstacles by walking, crawling, or slithering, and it can deflate to fit through tiny gaps.
These distributed soft pumps operate much more like human hearts and the arteries from which blood is delivered. We’ve had robot blood that we published from our group, and now we have robot hearts. The combination of the two will make more lifelike machines.
Rob Shepherd
In a previous experiment, Whitesides and his colleagues created a starfish-shaped gripper using elastic polymers that inflate like balloons for actuation. The soft gripper was capable of performing delicate tasks such as picking up eggs. Soft robots cannot yet handle heavy loads or conduct electricity, but researchers believe that by incorporating the right materials, they will be able to do so in the future.
“These distributed soft pumps operate much more like human hearts and the arteries from which blood is delivered,” said Rob Shepherd, associate professor of mechanical and aerospace engineering in the College of Engineering who led the Cornell team. “We’ve had robot blood that we published from our group, and now we have robot hearts. The combination of the two will make more lifelike machines.”
The group’s paper, “Magnetohydrodynamic Levitation for High-Performance Flexible Pumps,” published in Proceedings of the National Academy of Sciences. The paper’s lead author was postdoctoral researcher Yoav Matia.

Shepherd’s Organic Robotics Lab has previously used soft material composites to design everything from stretchable sensor “skin” to combustion-driven braille displays and clothing that monitors athletic performance – plus a menagerie of soft robots that can walk and crawl and swim and sweat. Many of the lab’s creations could have practical applications in the fields of patient care and rehabilitation.
Soft robots, like animals, require a circulatory system to store energy and power their appendages and movements in order to complete complex tasks.
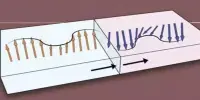
The new elastomeric pump is made up of a soft silicone tube with coils of wire – known as solenoids – spaced around the outside. The tube can bend and stretch due to the gaps between the coils. A solid core magnet is surrounded by magnetorheological fluid inside the tube, which stiffens when exposed to a magnetic field, keeping the core centered and creating a critical seal. Depending on how the magnetic field is applied, the core magnet can be moved back and forth, much like a floating piston, to push fluids forward with continuous force and without jamming, such as water and low-viscosity oils.
“We’re operating at pressures and flow rates that are 100 times what has been done in other soft pumps,” said Shepherd, who served as the paper’s co-senior author with Nathan Lazarus of the U.S. Army Research Laboratory. “Compared to hard pumps, we’re still about 10 times lower in performance. So that means we can’t push really viscous oils at very high flow rates.”
The researchers carried out an experiment to demonstrate that the pump system can maintain continuous performance even when subjected to large deformations, and they recorded the performance parameters so that future iterations can be tailored to different types of robots.
“We thought it was important to have scaling relationships for all of the different pump parameters, so that when we design something new, with different tube diameters and lengths, we would know how to tune the pump for the performance we want,” Shepherd explained.