Monitoring pipes with a network of robots outfitted with acoustic wave sensors is a novel and effective method. This technology makes use of robots’ ability to navigate complex environments as well as the sensitivity of acoustic sensors to detect changes in the pipe’s condition.
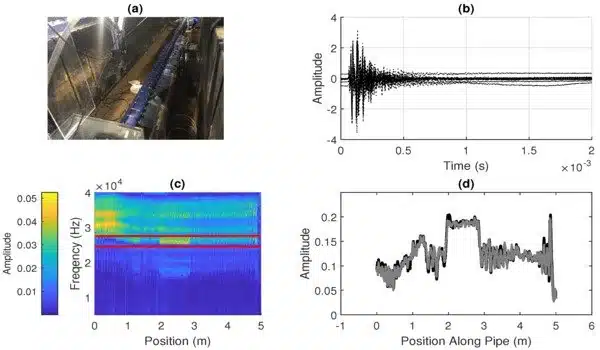
The successful inspection of multiple defects on a three-meter-long steel pipe using guided acoustic wave sensors demonstrated an inspection design method and procedure for mobile robots to inspect large pipe structures.
The approach developed by the University of Bristol team, led by Professor Bruce Drinkwater and Professor Anthony Croxford, was used to review a long steel pipe with multiple defects, including circular holes of varying sizes, a crack-like defect, and pits, through a designed inspection path to achieve 100% detection coverage for a defined reference defect.
They show how they were able to effectively examine large plate-like structures using a network of independent robots, each carrying sensors capable of both sending and receiving guided acoustic waves in pulse-echo mode, in the study, which was published today in NDT and E International.
There are many robotic systems with integrated ultrasound sensors used for automated inspection of pipelines from their inside to allow the pipeline operator to perform required inspections without stopping the flow of product in the pipeline.
Dr Jie Zhang
This approach has the major advantage of reducing communication between robots, eliminating the need for synchronization, and increasing the possibility of on-board processing to reduce data transfer costs and, as a result, overall inspection expenses. The inspection was divided into two stages: defect detection and defect localization.
“There are many robotic systems with integrated ultrasound sensors used for automated inspection of pipelines from their inside to allow the pipeline operator to perform required inspections without stopping the flow of product in the pipeline,” said lead author Dr Jie Zhang. However, existing systems are incapable of dealing with varying pipe cross-sections or network complexity, resulting in pipeline disruption during inspection. This makes them suitable for specific inspections of high-value assets, such as oil and gas pipelines, but not generally applicable.”
“As the cost of mobile robots has decreased in recent years, it is becoming increasingly possible to deploy multiple robots for a large area inspection. We begin with the existence of small inspection robots and investigate how they can be used for general structural monitoring. This necessitates inspection strategies, methodologies, and assessment procedures that can be integrated with mobile robots for accurate defect detection and localization at a low cost and efficiency.
“We investigate this problem by considering a network of robots, each with a single omnidirectional guided acoustic wave transducer. This configuration is considered because it is arguably the simplest, with good potential for integration in a low-cost platform.”
The methods used are generally applicable to other related scenarios and allow for quick quantification of the impact of any detection or localization method decisions. The methods could be applied to other materials, pipe geometries, noise levels, or guided wave modes, allowing researchers to investigate the full range of sensor performance parameters, defect sizes and types, and operating modalities. The techniques can also be used to evaluate detection and localization performance for specific inspection parameters, such as predicting the minimum detectable defect under a given probability of detection and false alarm.













