Soft robotics is a branch of robotics that deals with the design, control, and construction of robots made of compliant materials rather than rigid linkages. In contrast to traditional rigid robotics, it focuses on creating and building robots out of soft and flexible materials. In contrast to rigid-bodied robots made of metals, ceramics, and hard plastics, soft robots’ compliance can improve their safety when operating in close proximity to humans. Soft robots are inspired by natural animals that are soft, malleable, and capable of responding to complex and dynamic surroundings, such as octopuses, worms, and human muscles.
Types and designs
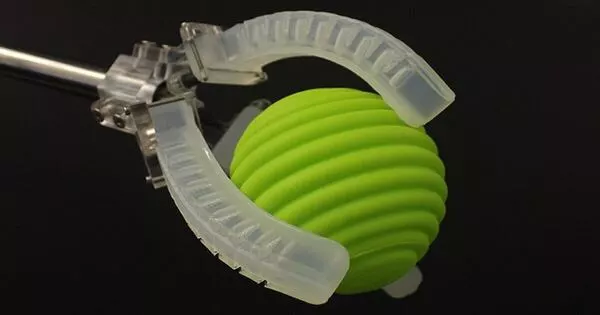
Soft robotics aims to design and build robots with physically flexible bodies and electronics. Softness is sometimes limited to a certain area of the machine. Rigid-bodied robotic arms, for example, can use soft end effectors to gently grasp and operate delicate or irregularly shaped objects. Most rigid-body mobile robots also use soft components strategically, such as shock-absorbing foot pads or springy joints to store and release elastic energy.
However, the discipline of soft robotics tends to favor robots that are mostly or fully soft. Robots with completely squishy bodies have enormous potential. For one thing, their flexibility enables them to fit into spaces that stiff bodies cannot, which could be valuable in disaster relief scenarios. Soft robots are also safer for human interaction and for internal deployment inside the human body.
Here are some key aspects and characteristics of soft robotics:
- Flexible Materials: Soft robots are made of materials that allow them to flex and alter shape, such as silicone, rubber, and fabric. This adaptability allows them to engage with their surroundings more efficiently.
- Compliance: Because soft robots are compliant and flexible, they can interact safely with humans and delicate items. They can function in uncertain and unstructured surroundings without harm.
- Versatility: Soft robots are capable of gripping, manipulating, crawling, swimming, and even emulating the movement of biological animals. Because of their adaptability, they are appropriate for a wide range of applications.
- Adaptability: Soft robots can adapt to changes in their environment, making them suitable for tasks where the terrain or conditions are unpredictable. They can squeeze through tight spaces, navigate uneven surfaces, and handle irregular objects.
- Biologically Inspired: Many soft robots draw inspiration from biology. For example, some designs mimic the motion of octopus tentacles or the flexibility of elephant trunks. This biomimicry can lead to innovative solutions for various applications.
Applications
Medical equipment (such as surgical tools and assistive gadgets), search and rescue robots, exploration of severe environments, and even soft exoskeletons for human support and rehabilitation are all applications of soft robotics.
Despite their numerous benefits, soft robots confront a number of obstacles, such as control and stability issues, energy efficiency, and long-term durability of soft materials. Researchers are still working to overcome these constraints.
Soft robotics is an interesting and fast-expanding discipline that has the potential to alter industries such as healthcare, manufacturing, and exploration by enabling robots to interact more securely and effectively in complex and dynamic situations.













