Slithering is a special indignity visited on the wicked serpent in Abrahamic texts, but evolution may draw a more continuous line through the motion of swimming microbes, wriggling worms, skittering spiders, and walking horses. According to a new study, all of these types of motion are well represented by a single mathematical model.
“This didn’t come out of nowhere; this is from our real robot data,” said Dan Zhao, first author of the study published in the Proceedings of the National Academy of Sciences and a recent Ph.D. graduate in mechanical engineering at the University of Michigan. “Even when the robot appears to be sliding, as if its feet are slipping, its velocity is still proportional to how quickly it moves its body.”
Unlike the dynamic motion of gliding birds and sharks and galloping horses – where speed is driven, at least in part, by momentum – every bit of speed for ants, centipedes, snakes, and swimming microbes is driven by changing the shape of the body. This is known as kinematic motion.
This didn’t come out of nowhere – this is from our real robot data. Even when the robot looks like it’s sliding, like its feet are slipping, its velocity is still proportional to how quickly it’s moving its body.
Dan Zhao
The improved understanding of kinematic motion could change the way roboticists think about programming multi-legged robots, for example, opening up new possibilities for walking planetary rovers.
Shai Revzen, senior author of the study and professor of electrical and computer engineering at U-M, explained that two- and four-legged robots are popular because more legs are extremely difficult to model using current tools.
“This never sat well with me because my work was on cockroach locomotion,” Revzen said. “I can tell you many things about cockroaches. One of them is that they’re not brilliant mathematicians.” And if cockroaches can walk without solving extremely complex equations, there has to be an easier way to program walking robots. The new finding offers a place to start.

Slipping feet complicates typical motion models for robots, and the assumption was that it might add an element of momentum to the motion of many-legged robots. But in the model reported by the U-M team, it is not so different from lizards that “swim” in sand or microbes swimming in water.
Because microbes are so small, the water appears thicker and stickier, as if a human were swimming in honey. In all of these cases, the limbs move through the surrounding medium or slide across a surface rather than being connected at a fixed point.
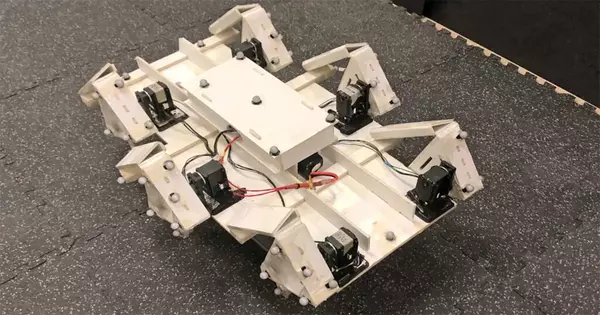
The team discovered the link by taking a well-known model that describes swimming microbes and reconfiguring it for use with their multi-legged robots. The model accurately reflected their data, which came from multipods – modular robots with 6 to 12 legs – and BigAnt, a six-legged robot.
The team also collaborated with Glenna Clifton, assistant professor of biology at the University of Portland in Oregon, who provided data on ants walking on a flat surface. While the robot legs slip a lot – up to 100% of the time for the multipods – ant feet have much firmer connections with the ground, slipping only 4.7% of the time.
Even so, the ants and robots followed the same equations, with their speeds proportional to how quickly they moved their legs. It turned out that this kind of slipping didn’t alter the kinematic nature of the motion.
In terms of what this means for how walking evolved, the team points to the worm, which is thought to be the last common ancestor of all creatures with two sides that are mirror images of each other. They propose that this worm, wriggling through water, already had the foundations of the motion that allowed the first animals to walk on land. Humans, too, begin to learn to propel themselves kinematically, crawling on hands and knees with three points of contact on the ground at any time.
The researchers propose that the skills of managing momentum – running with four legs or fewer, walking or running on two legs, flying or gliding – build on top of that older knowledge of how to move.













